
Planning for a Rigid Robot in a Planar World
Here, RRTs are used to path the path for a rigid robot among obstacles
in a 2D environment.
In addition to these examples, other results appear in:
RRT-Connect: An Efficient
Approach to Single-Query Path Planning
by James J. Kuffner, Jr. and Steven M. LaValle, submitted to 2000
IEEE International Conference on Robotics and Automation.
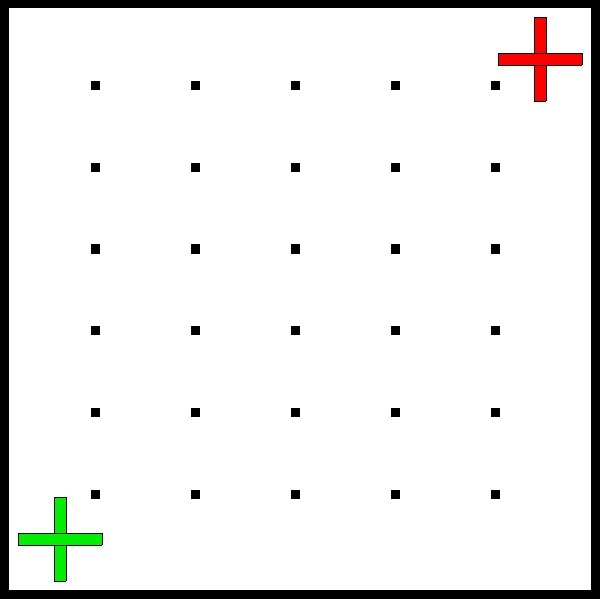
The task is to being the robot from the configuration shown in red
to teh configuration shown in green.
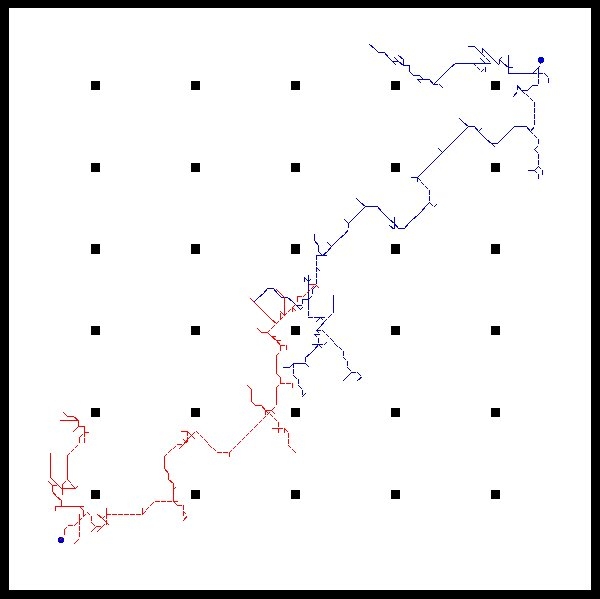
The RRTs are shown (projected from a 3D configuration space by
using only xy coordinates of the vertices).
The resulting solution path.
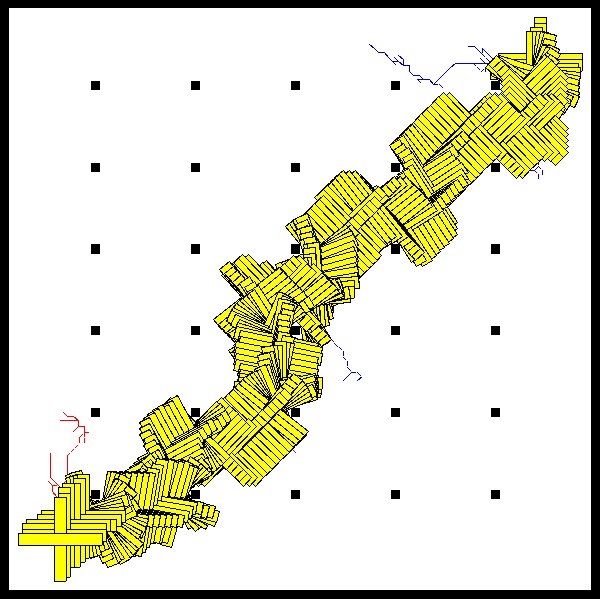
An animation of the solution.
In a different run, an alternative solution is computed due to
the randomness.

Another example is shown below.


Return to RRT Gallery page
Return to main RRT page
Web page maintained by Steve LaValle