
Planning for a Point Robot in a Planar World
RRTs can be applied to solve the simple problem of determining how to
get from one place to another in a 2D cluttered environment. Of
course, there are many other techniques that can solve this problem.
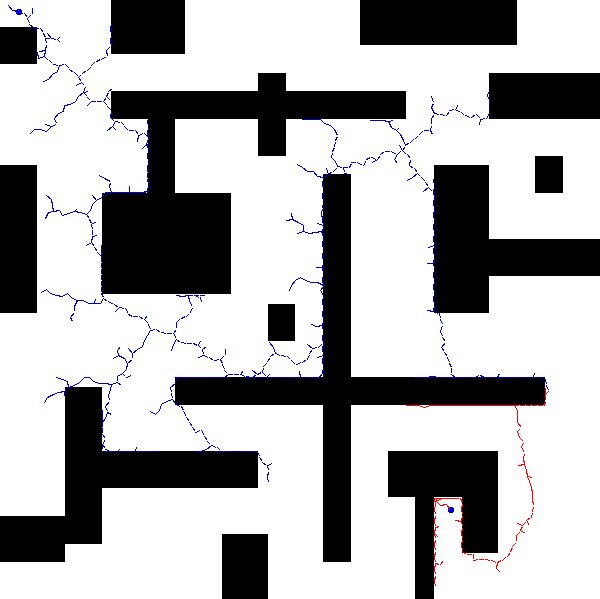
A cluttered 2D envoronment.

RRTs that were grown from initial and goal positions. The RRT grown
from the initial position is shown in blue; the other is red.
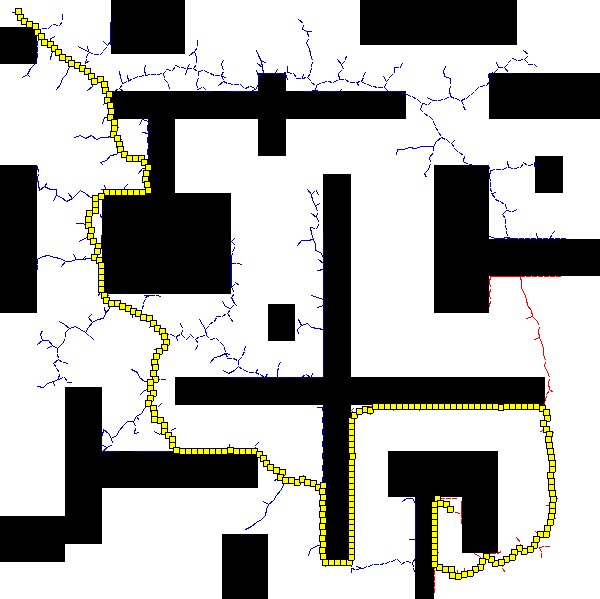
The two RRTs meet in the middle, and the following path is obtained.
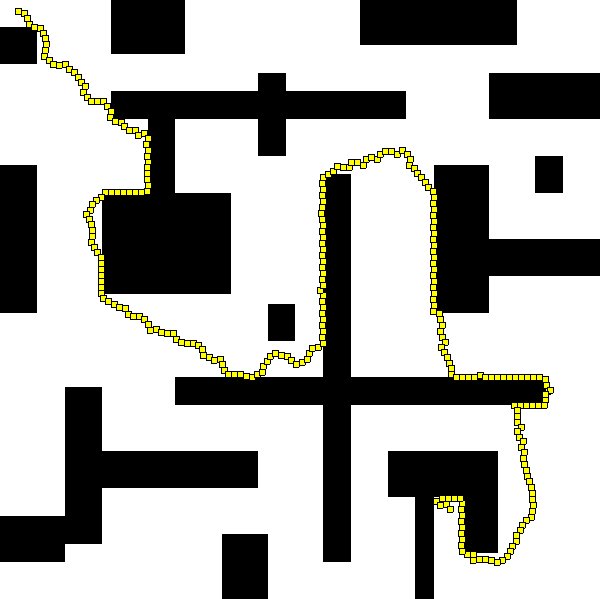
In a separate run, a different path is obtained due to the randomness.
Return to RRT Gallery page
Return to main RRT page
Web page maintained by Steve LaValle