
Planning in a Narrow Corridor
Narrow passages in the configuration space often cause difficulty
for randomized path planners (including RRT-based planners). Below
is an RRT-based solution to a problem presented by V. Boor,
M. H. Overmars and A. F. van der Stappen, at ICRA 99.
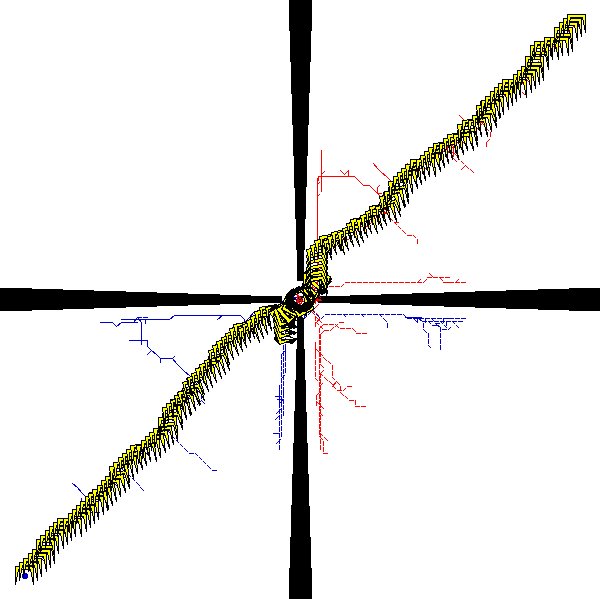
Here, RRTs are used to path the path for a rigid robot among obstacles
in a 2D environment.
The task is to being the robot from the configuration shown in red
to teh configuration shown in green.

The RRTs are shown (projected from a 3D configuration space by
using only xy coordinates of the vertices), along with the solution
path.
An animation of the solution.

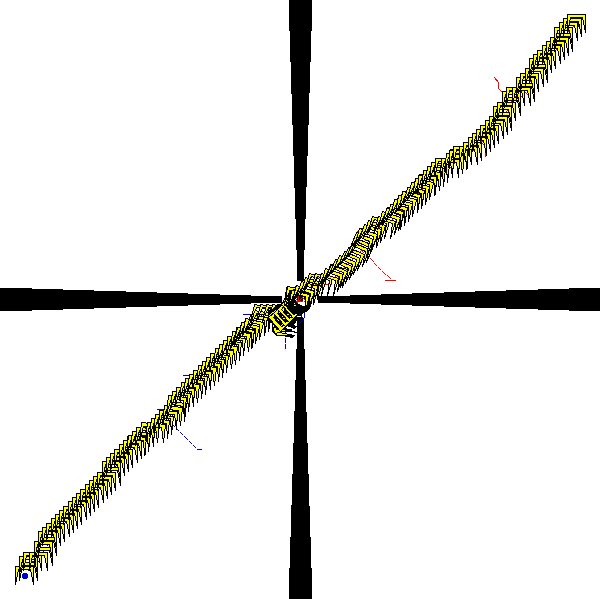
In a different run, an alternative solution is computed due to
the randomness.

Another run yields the following.
Return to RRT Gallery page
Return to main RRT page
Web page maintained by Steve LaValle