
Planning for a Forward-Only Car-Like Robot
This problem involves differential (nonholonomic) constraints on a
car-like robot. The robot has a limited steering angle, and is
required to roll along the ground (i.e., it cannot move sideways).
The robot moves forward only.
The equations of motion are:
dx[0] = Speed*u[0]*cos(x[2]);
dx[1] = Speed*u[0]*sin(x[2]);
dx[2] = tan(u[1])/CarLength;
in which dx represents dx/dt, u represents the input vector, and
x represents the state vector.
An RRT that takes into account these differential constraints
is shown below.
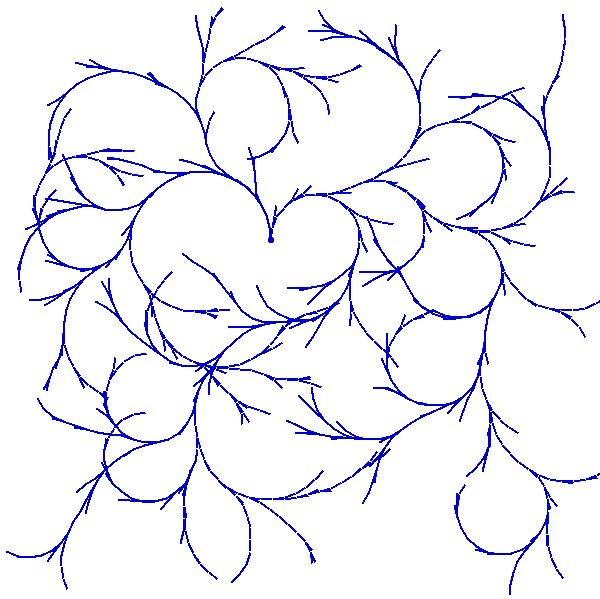
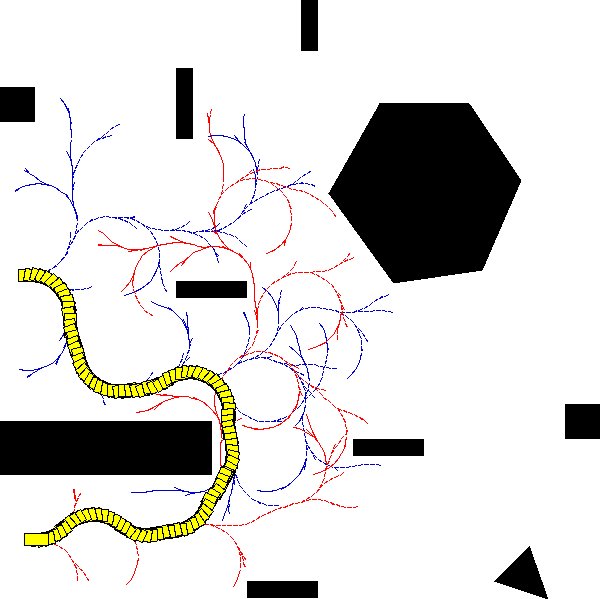
An example solution path for a simple problem is shown below. The
RRTs are shown (projected from a 3D configuration space by using only
xy coordinates of the vertices).

An alternative solution, obtained after a second run, is shown below.
An animation of the solution.
A solution for a more challenging problem.

This problem is similar to the previous one, except that the
maximum steering angle is smaller. Note the small curvature
along the path.

Return to RRT Gallery page
Return to main RRT page
Web page maintained by Steve LaValle