
Planning for a Car-Like Robot
This problem involves differential (nonholonomic) constraints on a
car-like robot. The robot has a limited steering angle, and is
required to roll along the ground (i.e., it cannot move sideways).
The robot can move in both forward or reverse.
The equations of motion are:
dx[0] = Speed*u[0]*cos(x[2]);
dx[1] = Speed*u[0]*sin(x[2]);
dx[2] = tan(u[1])/CarLength;
in which dx represents dx/dt, u represents the input vector, and
x represents the state vector.
An RRT that takes into account these differential constraints
is shown below.
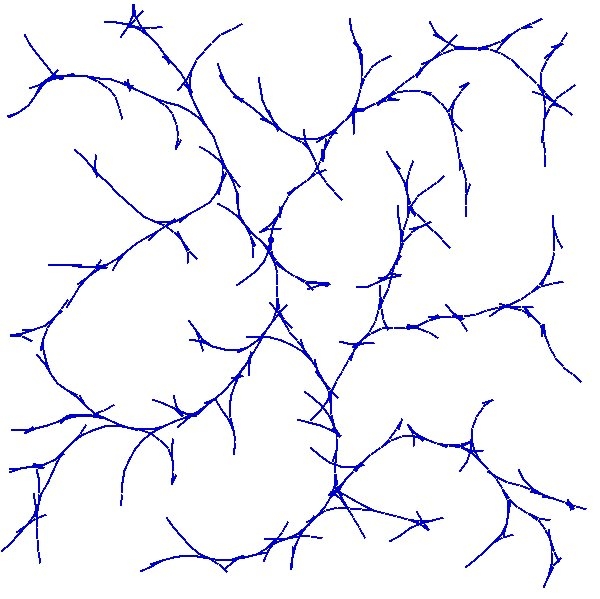
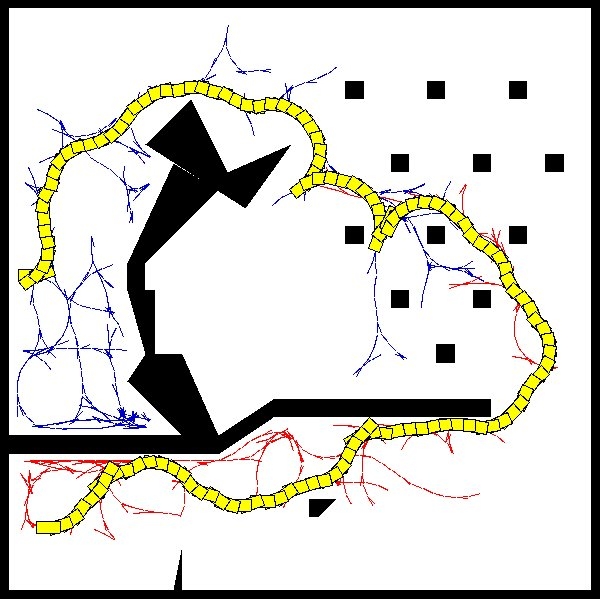
An example solution path for a simple problem is shown below. The
RRTs are shown (projected from a 3D configuration space by using only
xy coordinates of the vertices).

The resulting solution path for
a more difficult problem.
An animation of the solution.
Return to RRT Gallery page
Return to main RRT page
Web page maintained by Steve LaValle